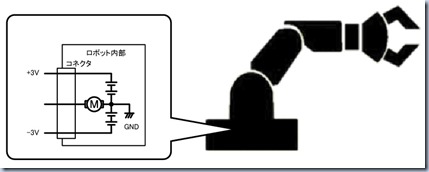
こんにちは。開発「M」です。 「ロボットアームを動かしてみた。」ブログを読んだ方から、「具体的にどこをどう配線したの?」「なぜモータードライバーICを使わないの?」とのご質問をいただきました。お返事を兼ねて、このブログで […]
今月発売の新製品ロボットに「とげまる」があります。 とげまるはハリネズミ型のロボットで音センサーを搭載しています。手ばたきの音に反応し、ボディーを丸めながらでんぐり返しをする、とてもユニークな […]
遅ればせながら、明けましておめでとうございます!お久しぶりのシェイミです。 年末あたりからぐっと寒くなりましたが、皆様元気に良いお年を迎えられましたか?福岡では今週末は雪が降るようで、外出の予定があったのですが、家でゆっ […]