

こんにちは。久しぶりの開発「M」です。
最近机の上を見回していると、Arduinoがゴロロンと、その隣にはロボットアーム制御ボード(IF-100)がゴロロンと転がっていました。ひらめきました。Arduinoでロボットアームを動かしたら、好きなようにきめ細かく制御できるのではないかと。
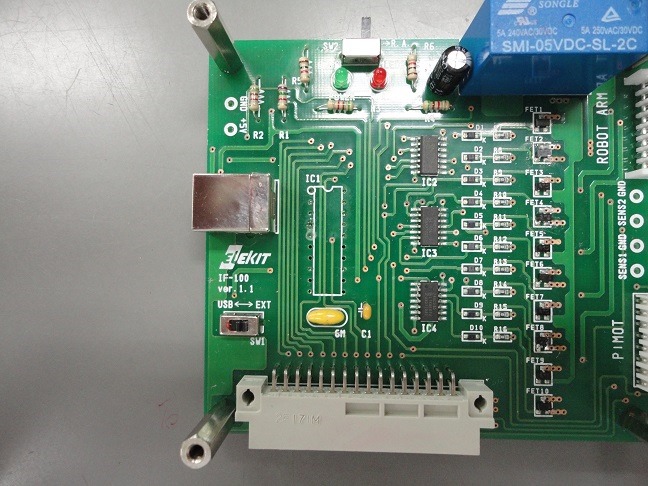
 ←IF-100(左)とArduino(右)
←IF-100(左)とArduino(右)
早速Arduinoを接続しましょう。
まずは、IF-100のボードに載っているマイコンを取り去ります。
次に、Arduinoのどのポートでどの回路を動かすかを考えながら配線します。
関節用に10本と、電源用に2本です。ArduinoとPCが通信に使うポート0とポート1を使うと後々変な動きで悩まされることが多いので、このポートは避けてチマチマと配線します。
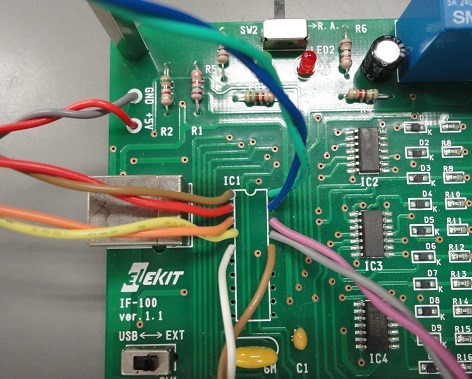

Arduinoにプスッと差し込めるように、配線の片側はピンヘッダーを使いました。はんだ付け部分はむき出しなので、ちょっと危なっかしい気もしますが、ここは気にしないことにします。
とりあえず動けばいいので、見た目は気にせず、IF-100のパネルにタイラップで固定します。

できました。
早速Arduinoでプログラムを作成します。ポートのON/OFFだけなので、初期設定以外はdigitalWrite命令だけでOK。

Arduinoに書き込むと・・・
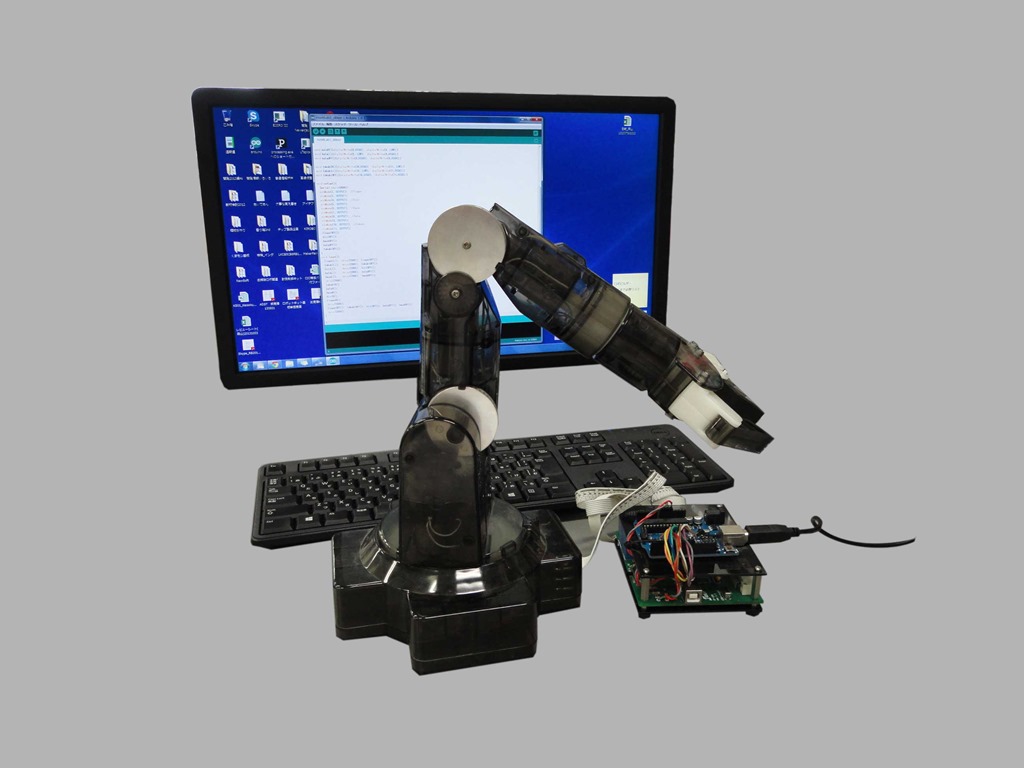
無事、ウイーンと音を立てて動いております。
当然のことながらプログラムを書き換えると、動く関節も動く時間も変わります。動かしてみると想像していたより楽しめます。思わずあれこれプログラムを変更して、ロボットアームの動きの変化を眺めてうっとりしてしまいます。命令どおりにうごくロボットってけなげでいいですね。IF-100でも同じことができるのに何故にわざわざArduino化?という疑問はごもっともですが、ポイントはArdinoにはまだ使っていないポートがあるということ。何かのセンサーやスイッチをロボットアームに取り付ければ、センサーに反応して動く、ちょっといい感じのロボットアームになりそうでワクワクさせてくれます。
・・・しかし、ちょっと動かしたいだけでも、いちいちプログラムを作成して書き込むのは面倒だなあ。
次はマウス操作で動くようにしてみようかなと思います。


