
こんにちは。開発「M」です。
「ロボットアームを動かしてみた。」ブログを読んだ方から、「具体的にどこをどう配線したの?」「なぜモータードライバーICを使わないの?」とのご質問をいただきました。お返事を兼ねて、このブログで伝えたいと思います。
「なぜモータードライバーICを使わないのか?」
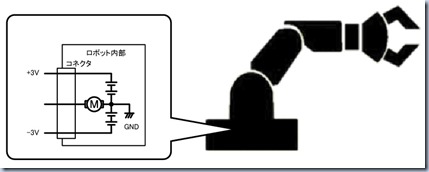
ロボットアームはちょっとやっかいな仕様なのです。そのやっかいな部分は、図のように両電源で動かしていて、GNDがコネクターに(外部に)出てきていないと言う部分です。
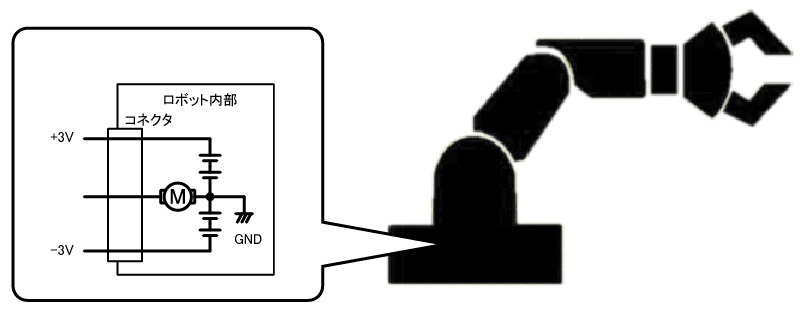
市販のモータードライバーICは殆どが単電源用なのでそのままでは使えません。無理矢理に使おうと思ってもロボット側からGNDが出ていないので、うまく接続できないのです。(・・・もしかしたらあるのかも知れませんが、私の知恵ではうまくいきません。)制御するには、ロボット側のGNDに関係なく電流をON/OFFするスイッチを構成しなければいけません。例えばリレーを使う方法か、IF-100で使っているようなFETを使う方法になってしまいます。
市販されているモータードライバーシールドが使えれば、もっとスマートになると思いますが、上に書いた理由でモータードライバーICが使えませんので、IF-100を流用するのが簡単だったのです。
ちなみにIF-100には、両方のFETが同時にONしないためのSafe回路も組み込んでありますので、そういった安全面を考えなくてもよかったことも流用の理由です。ちなみに、モーターの正反転を制御するFETが同時にONすると、FETは間違いなく燃えてしまいます。モーター制御回路を自作してプログラムで動かすときは、十分注意していても何故かFETを同時にONさせてしまい、貫通電流で部品を壊してしまうことは電子工作あるあるです。
「で?具体的にどう配線したの?」
言葉で説明するよりも図の方が分かりやすいと思います。写真を見てください。
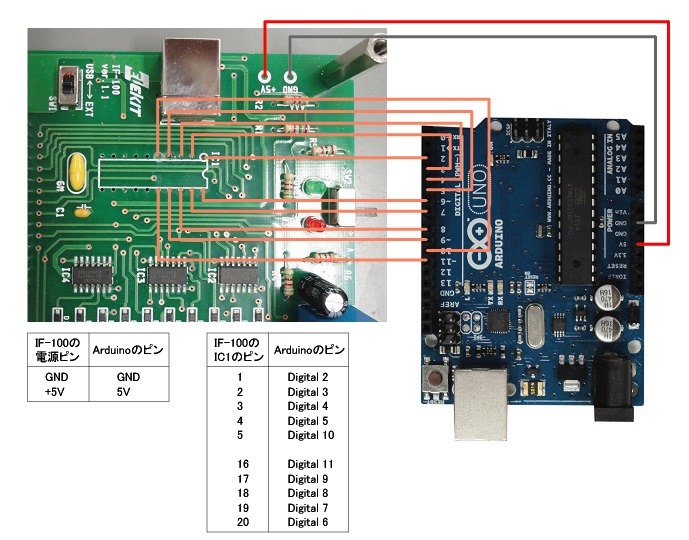
両面基板の穴の部分は普通はスルーホール加工がされていてDIP部品(基板に足を差し込んで裏面ではんだ付けするタイプ)を取り外すのは大変なのですが、IF-100のマイコンの部分だけはちょうどよくスルーホール加工がされていないので、はんだ吸い取り線や吸い取り器でチマチマがんばれば綺麗に取り外すことができます。
配線以外は何も加工するところはありませんが、IF-100のSW1は「EXT」と書いてあるほうにスライドさせておきます。
ちなみに、同じような場所に次々に配線するときも、何故かいつの間にか1つズレてしまうという電子工作あるあるが発動しますので、十分確認しながら作業するようにしましょう。



私は在庫品のシーケンサー(PLC)を利用して制御しています。投稿がコメントしているようなめんどうな事は一切ありません。正・逆のインターロックも簡単です。小規模なシーケンサーはネットでとても安く手に入りますよ。
シーケンサーを使う方法は確実ですね。電流も結構取れますし。今までシーケンサーは使ったことがなかったので、試作に使うことを思いつきませんでした。価格がとても高いイメージがあったのですが、最近では安いものも手に入るのですね。知りませんでした。機会を見つけて触ってみたいと思います。