ELEKITには、店頭やWebで販売しているキットだけでなくワークショップ用に開発している商品もあります。
今回の小学生対象のワークショップでは”FabWalker ε(ファブウォーカー・イプシロン)”というキットを使って、デジタルファブリケーションについて学びながらロボットの組み立て、ロボットのプログラミングを行いました。
※「FabWalker ε」のキットはワークショップ専用品のため、一般販売はしておりません。
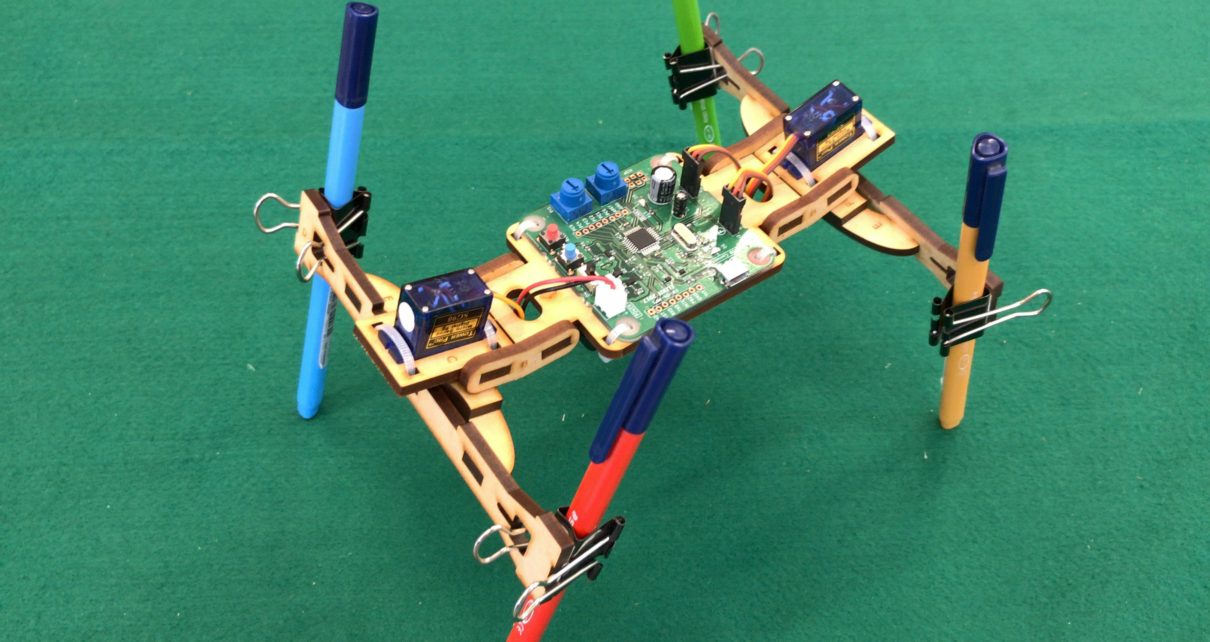
 FabWalker ε(ファブウォーカー・イプシロン)
FabWalker ε(ファブウォーカー・イプシロン)
FabWalkerは、慶応義塾大学SFCの山岡潤一氏により企画されたロボットキットです。足をペンや割り箸など様々なものを自由にとりつけられるようになっており、足の素材によって変わる歩き方を観察しながら「試行錯誤しながら行うものづくり」を学べるキットになっております。
FabWalker εが歩いている様子はこちら↓
今回は慶応義塾大学SFCの山岡潤一氏ご本人による講義もあり、デジタルファブリケーションとは何なのか、世界のものづくりはどうなっていくのかをみんなで学びました。
 山岡潤一先生による講義。子供も大人も興味津々です。
山岡潤一先生による講義。子供も大人も興味津々です。
さあ、FabWalker εの製作開始です!
FabWalker εの体はレーザーカッターで切り出したMDF板が素材となっております。
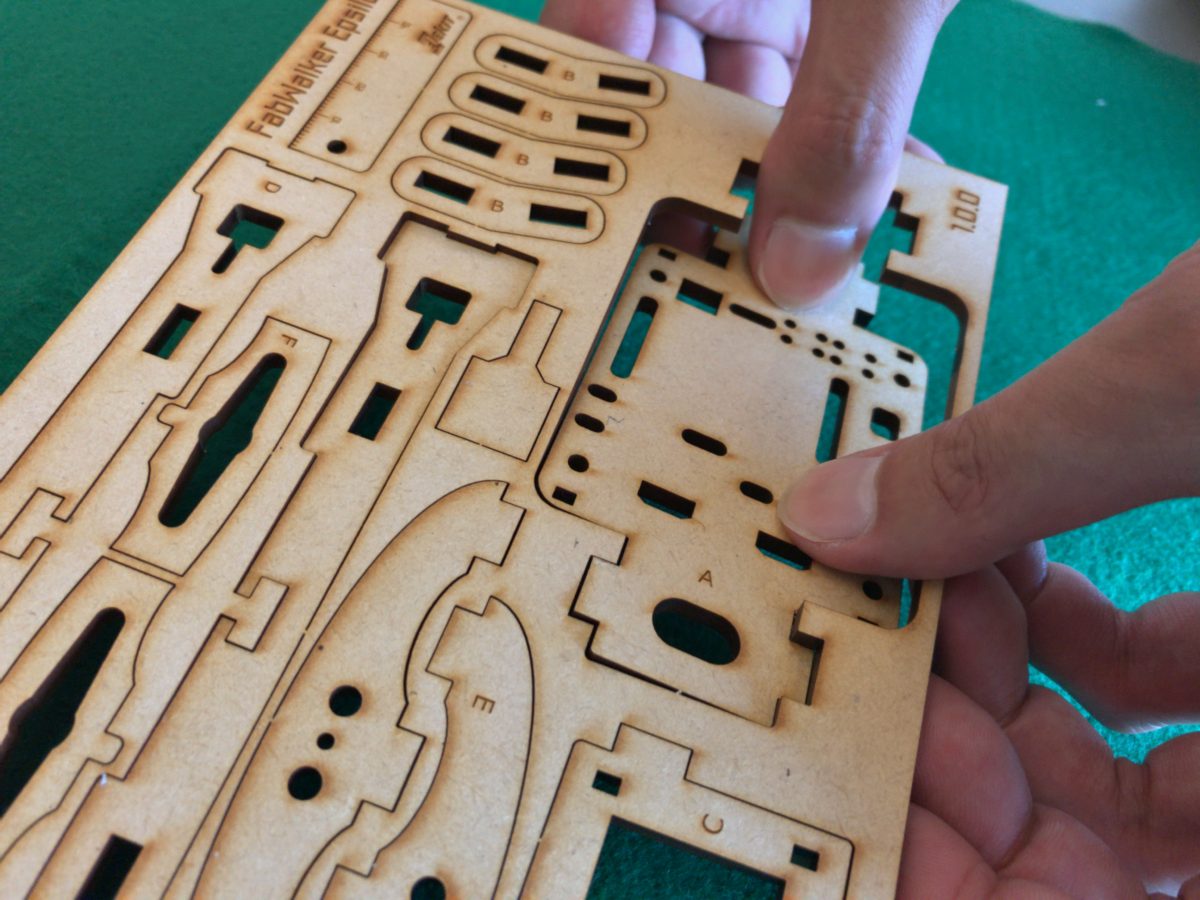 レーザー加工したMDF板のフレームから部品を取り外します。
レーザー加工したMDF板のフレームから部品を取り外します。
この部品にサーボモーターや制御基板、クリップなどを取り付けると…
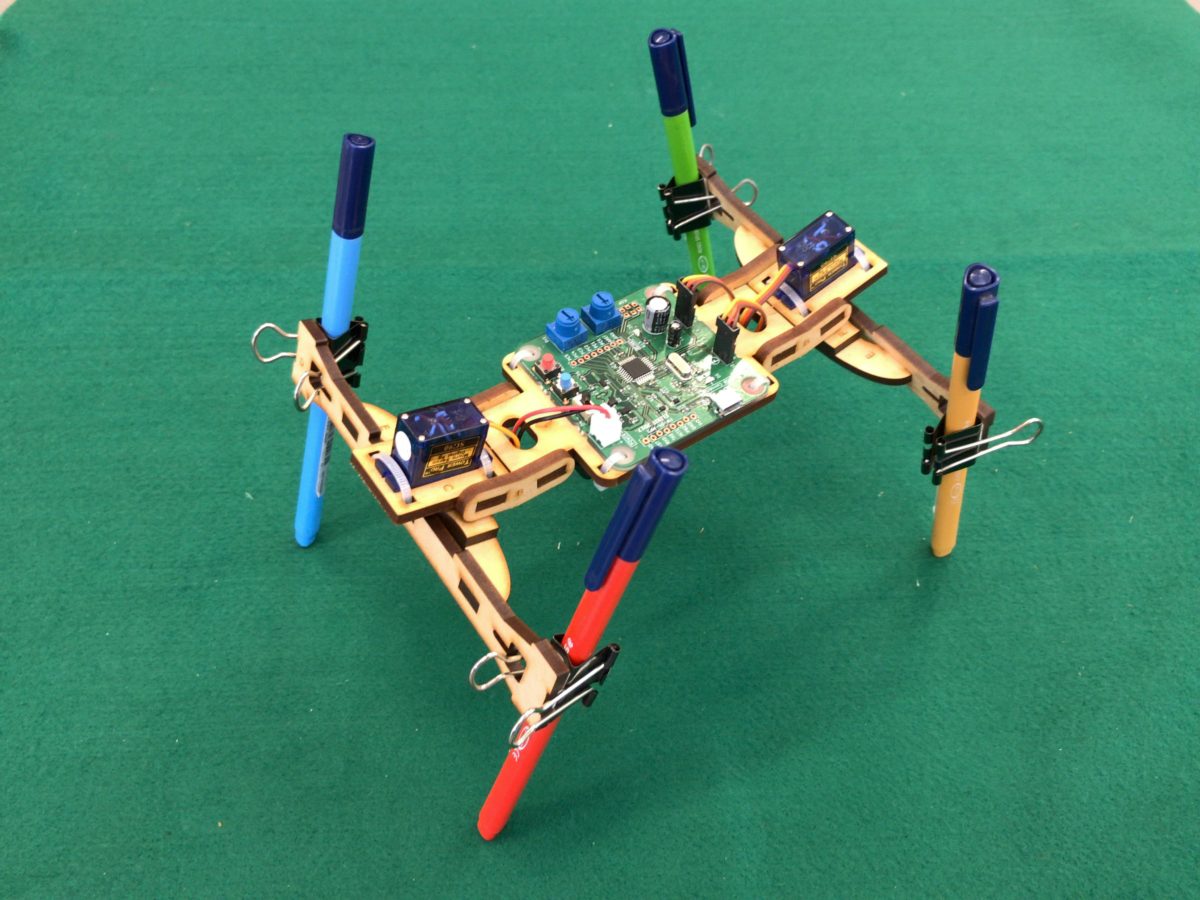
このような姿になります!
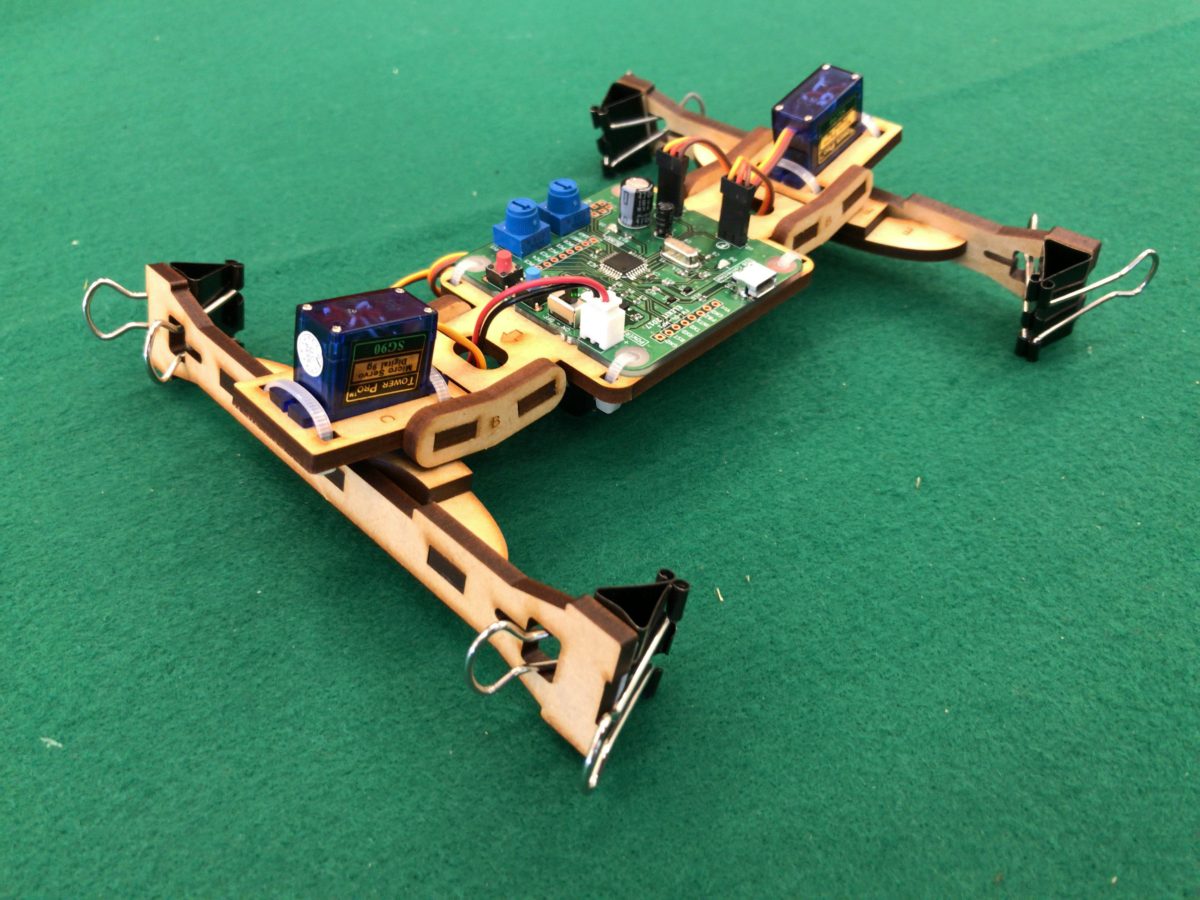 組み立て完了!
組み立て完了!
このクリップにペンを挟むと…
このように立派な足がつきます!他にはどんな足が作れるかな?
これでFabWalkerの本体は完成です。
さてさて、ここからはプログラミングをします。
プログラミングにはELEKITで開発した「PaletteLab(パレットラボ)」というプログラミングソフトを使ってFabWalkerの動きを制御します。
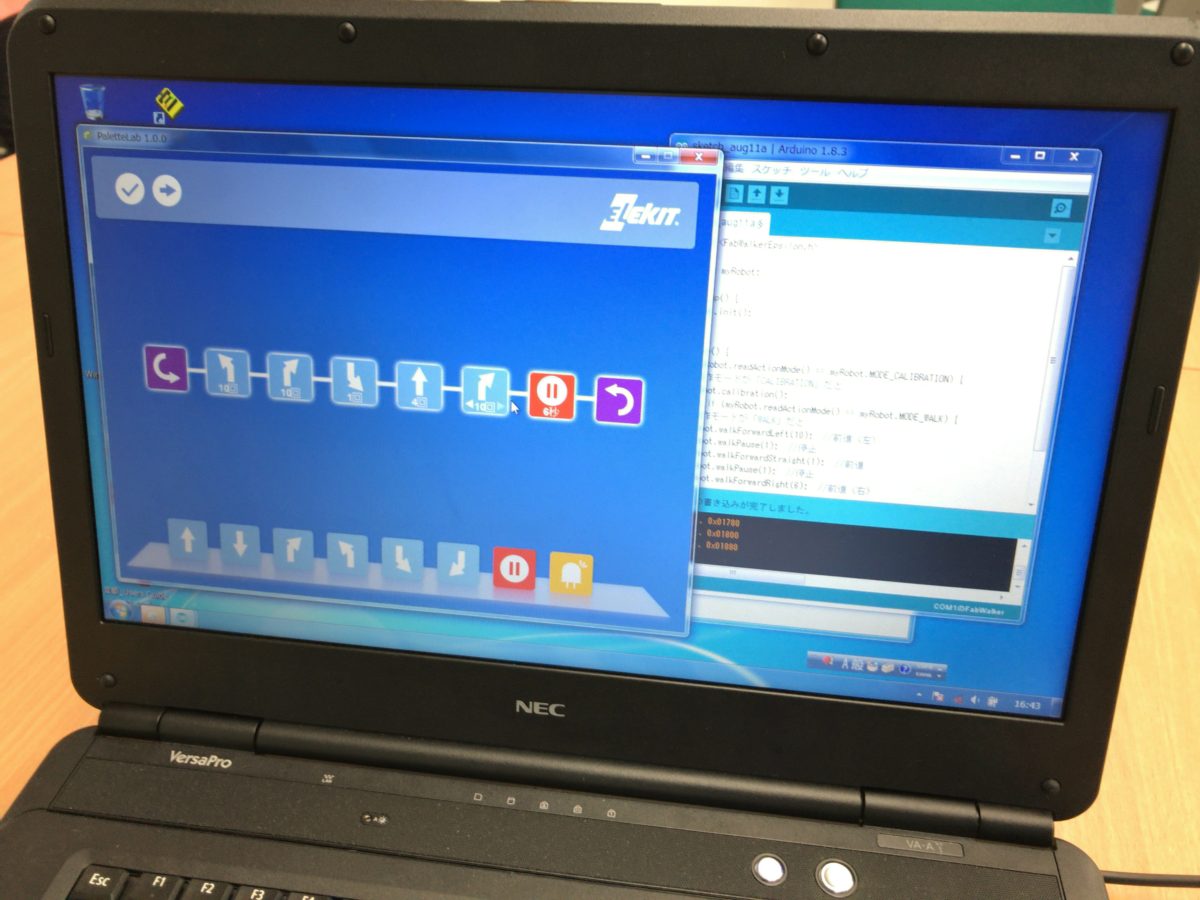 GUIプログラミングソフト「PaletteLab」
GUIプログラミングソフト「PaletteLab」
 説明書なしでも全員すぐに使いこなしていました!すごい!
説明書なしでも全員すぐに使いこなしていました!すごい!
今回のワークショップではFabWalker εをプログラミングしてある課題に挑戦していただきました。
課題となるフィールドはこちら↓
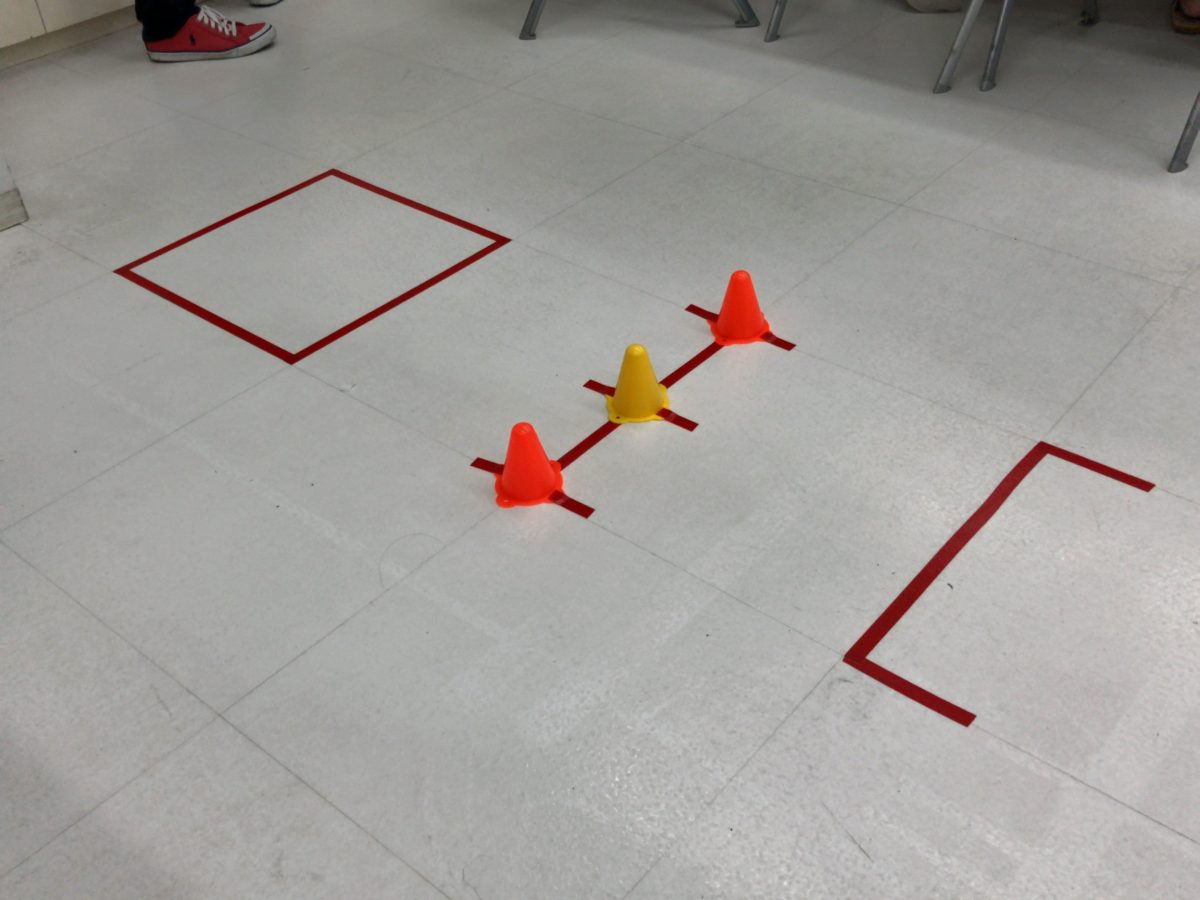 課題フィールド。右からスタート、左の四角がゴール。
課題フィールド。右からスタート、左の四角がゴール。
写真の右側がスタート、左側の四角がゴールとなっており、「スタートからパイロン(コーン)を回り込んでゴールの四角の中でピッタリ停止する」という競技課題を設定して参加者の皆さんにチャレンジしていただきました。
一見簡単そうにも見えますが、実際にやってみるとシビアな調整も必要ですぐにはクリアできません。
ワークショップでは1時間ほどプログラムや足の素材を試行錯誤し、およそ3割ほどの参加者が課題をクリアしました。
「3割」ってとこが絶妙な難易度設定ですね。我ながら良い課題だったと自負しております。
↓見事にゴールしましたよ!!
「3割がゴール」ということはもちろん「7割がゴールできなかった」ということになりますが、だからといって「適性がない」ということではありません。
ゴールできてもできなくても、大事なのは“これから継続して”コツコツと練習を続けていくかということです。
これはロボットでもスポーツでも一緒ですね。ローマは一日にしてならずですね。
このように、ELEKITのワークショップや組み立てキットには工作を通して「ものづくりの基本」、「サイエンスの不思議」、「試行錯誤の体験」などを楽しく学ぶことができる要素がいっぱい詰まっております。
株式会社イーケイジャパン(ELEKIT)はロボットや電子工作の工作教室/イベントのご依頼をいつでもお待ちしております。
「うちでも開催したいけど、どんなキットを使うのがいいんだろう…?」と検討中の方もぜひお気軽にお問い合わせください!