
福岡市内で最も歴史が長い小学校(大名小学校)の跡地を使って作られた官民共働型スタートアップ支援施設「FUKUOKA growth next」の中にある、ホームセンターのグッデイが運営するファブスペースGOODAY FAB DAIMYOで「ファブウォーカー」と「KOROBO2」によるプログラミングワークショップを開催させていただきました。
※KOROBO2のワークショップがGOODAY FAB DAIMYO主催で開催しております。
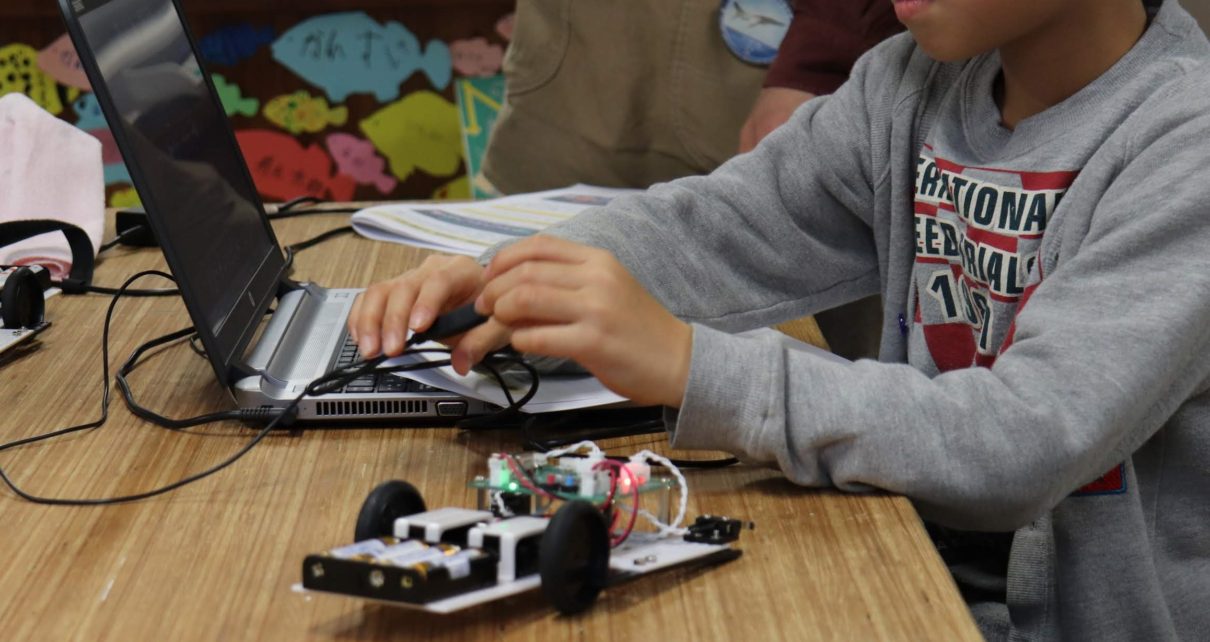
お掃除ロボット プログラミング教室
この教室ではKOROBO2を使います。
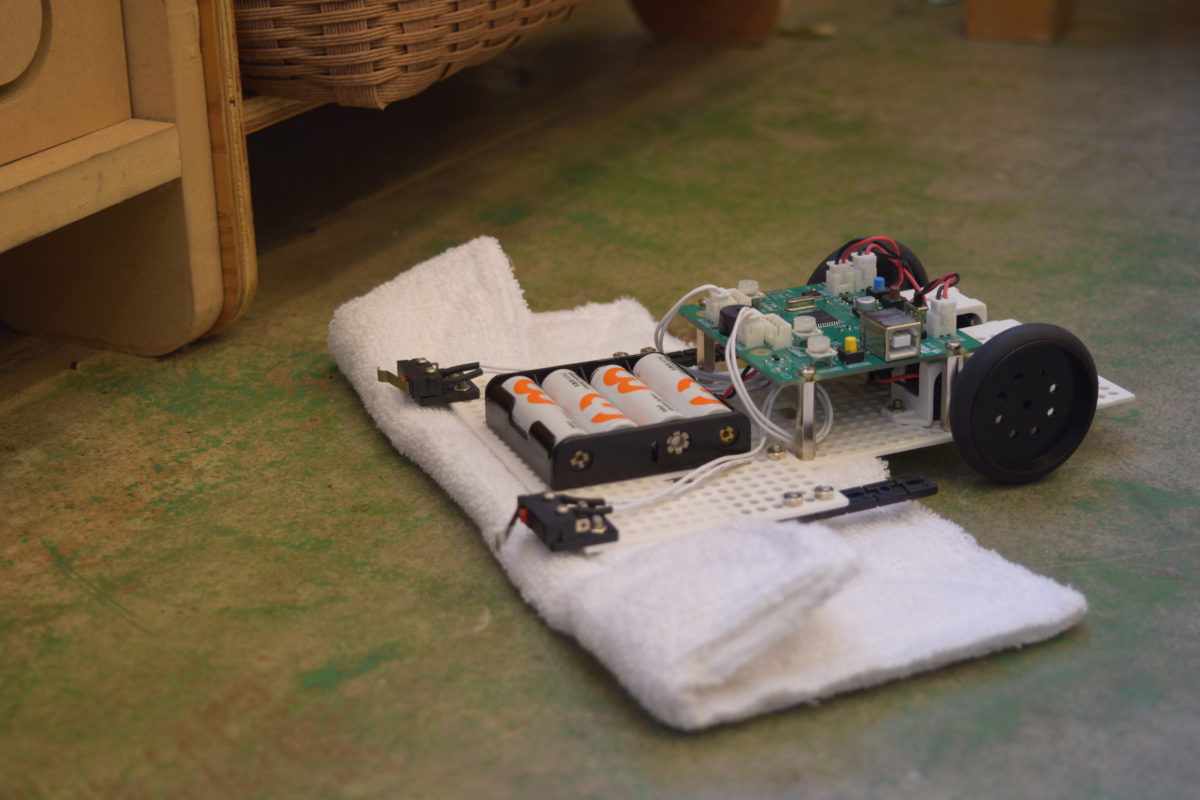
KOROBO2のプログラミングワークショップでは、KOROBO2の本体をちょっと改造して雑巾を取り付けた「お掃除ロボット」をプログラミングします。
本体の前方に取り付けられているタッチセンサー(スイッチ)で壁を検知しながらうまく雑巾がけをする動きを目指してプログラムの形を試行錯誤します。

プログラムを組み立てていく上で「プログラミングの基礎」と呼ばれる以下の3つのポイントを押さえて、どうやったらお掃除ロボットの動きに近づけることができるのかを考えながら少しずつプログラムを作っていきます。
- 順次実行(コンピュータは一つ一つの命令を順番に実行していく)
- 繰り返し処理(同じ動きを繰り返す)
- 条件分岐(センサーによる検知など、状況の違いに応じて行う命令を変える
プログラミングは「Palette IDE」というビジュアルプログラミングのソフトウェアを使って行います。
このソフトは特別な知識がなくてもアイコンをドラッグ&ドロップで並べていくだけの操作なので、初めてチャレンジする方でもすぐにロボットを制御することができます。


プログラムができたらゴミに見立てたものが散らかったフィールドでロボットを動かしながら試行錯誤します。

ずっと動かしているとだんだんゴミが端っこに集められます。

「掃除をする」という簡単な言葉でも、いざプログラミングをするときは「掃除をする」という命令が用意されているわけではありません。
タッチセンサーが反応したときにどのように動くか、タッチセンサーが左だったら、右だったらと方向の違いでどのように動きを変えるかは人によってプログラムに個性が出てきます。
生き物のように歩く4足歩行ロボット 組み立て・プログラミング教室
この教室では4足歩行ロボットキット”ファブウォーカー”の組み立てとプログラミングを行います。
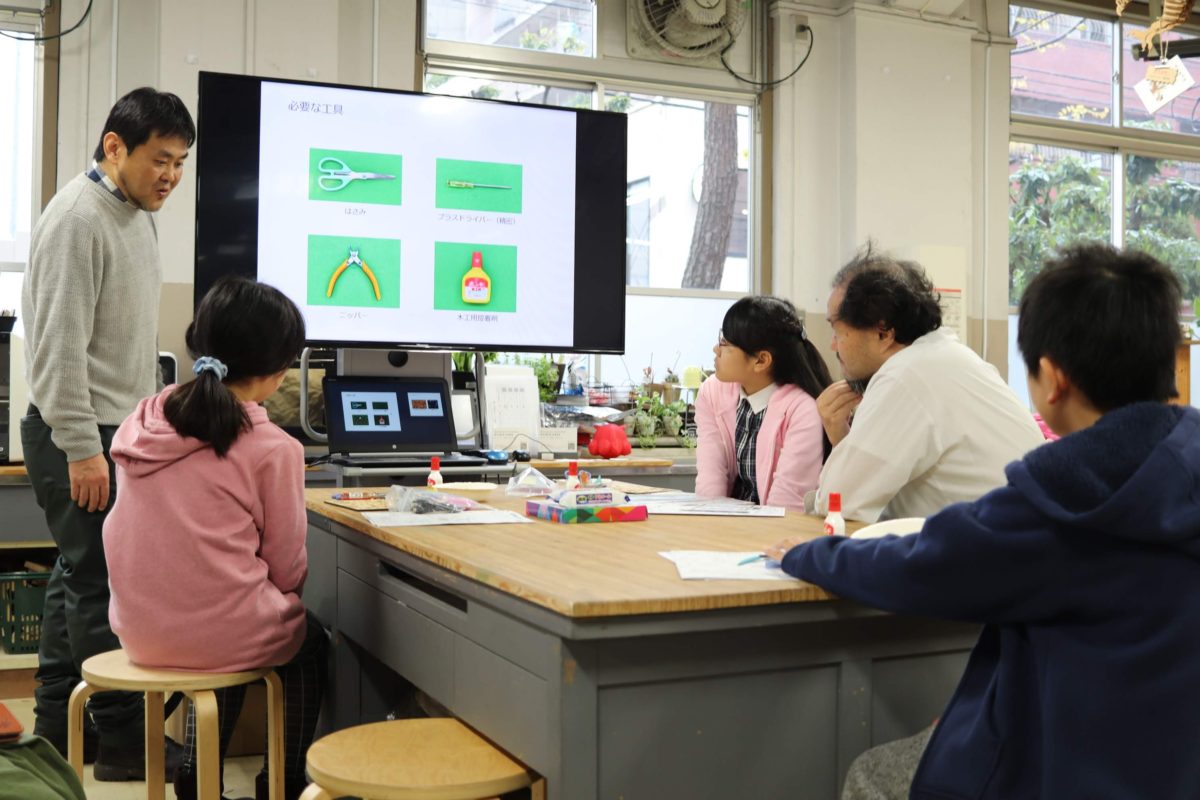
まずは工具を使ってファブウォーカーの本体を組み立てます。
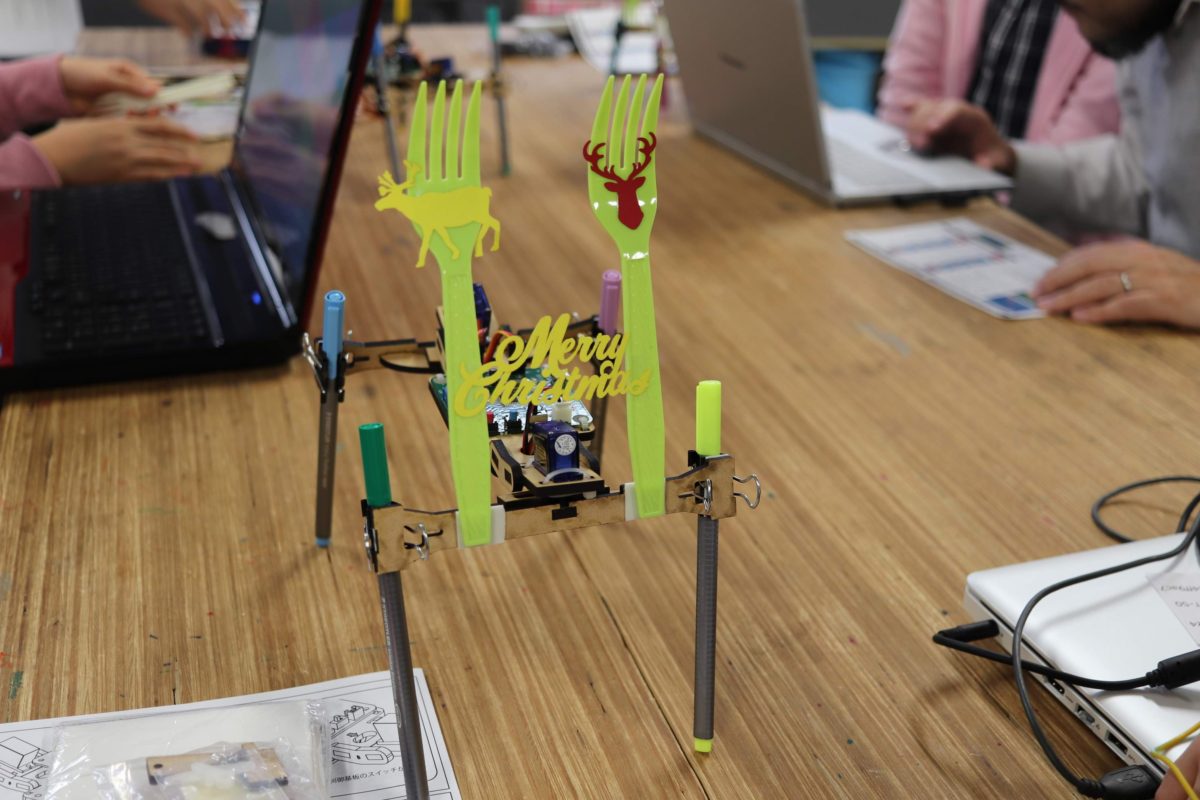
ファブウォーカーは足にクリップが取り付けられており、ペンやフォークなどを身近なものを足に取り付けていろんな”歩く”をデザインすることができます。
今回はペンを足に選んだようですね!

クリスマス版のファブウォーカーも出来上がってました!
フォークがトナカイの角のようになっていますね。
足を取り付けたら、プログラミングを始めます。

歩く様子はまるで生き物のよう。かわいいですね。

実際に歩かせるとこんな動きをします。
ファブウォーカーのワークショップではソフトウェアのプログラミングはもちろん、足の素材や長さを調整するなどの「ハードウェアのプログラミング」も楽しむことができます。
このように、ELEKITのワークショップや組み立てキットには工作を通して「ものづくりの基本」、「プログラミング的思考」、「試行錯誤の体験」などを楽しく学ぶことができる要素がいっぱい詰まっております。
株式会社イーケイジャパン(ELEKIT)はロボットや電子工作の工作教室/イベントのご依頼をいつでもお待ちしております。
「うちでもFabWalkerを使ってワークショップできるかな…?」とお考えの方、ぜひお気軽にお問い合わせください!


