2018年12月に発売するファブウォーカー、先日プレスリリースや動画を公開しました。
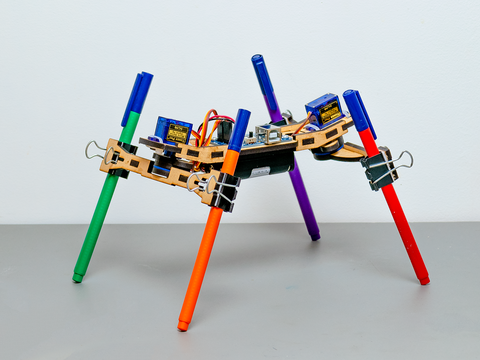
ファブウォーカーは東大助教の山岡先生と共同開発した製品で、これまでの研究経緯などはこちらの記事で紹介してあります。
https://voice.elekit.co.jp/archives/4414
今回発売に先立ち、山岡先生のもとでファブウォーカーのワークショップを実施いただきました。
東京は豊島区にある雑司が谷地域文化創造館という施設で、全体2時間程度の内容でした。
組み立てに関して、丁寧に解説を説明書に入れてあるので、工作の経験が少ないお子さんでも説明書さえ読めば完成出来るようになっています。
ただ、いくつか難しいところもあって、特に難しいのはサーボモーターの固定と、ホーンのねじどめ。
ネジを巻くところがむずかしかった
ねじしめとバランスづくりがむずかしかった
美しいロボットが出来て楽しかった.工夫するところがむずかしかった
と、参加したお子さん達の感想からもねじ留めが難しいというものが目立ちました。

ホーンのねじどめについては、このファブウォーカーにおいて特に考えさせるポイントの一つになっていますので、難しいと感じるのは狙い通りです。
サーボモーターという部品は破損しやすく、ファブウォーカーには前足と後ろ足で合計2つ使われています。
ホーンとモーターを直結すると、衝撃がダイレクトに伝わるので容易に破損してしまいますが、この衝撃を和らげるためにパッドによるクラッチ機構を取り入れてあります。
サーボモーターの破損、構造についてはこちらの記事でも紹介しています。
ただのモータじゃない!サーボモータを分解してみた
ファブウォーカーのクラッチ機構については、こんな感じです。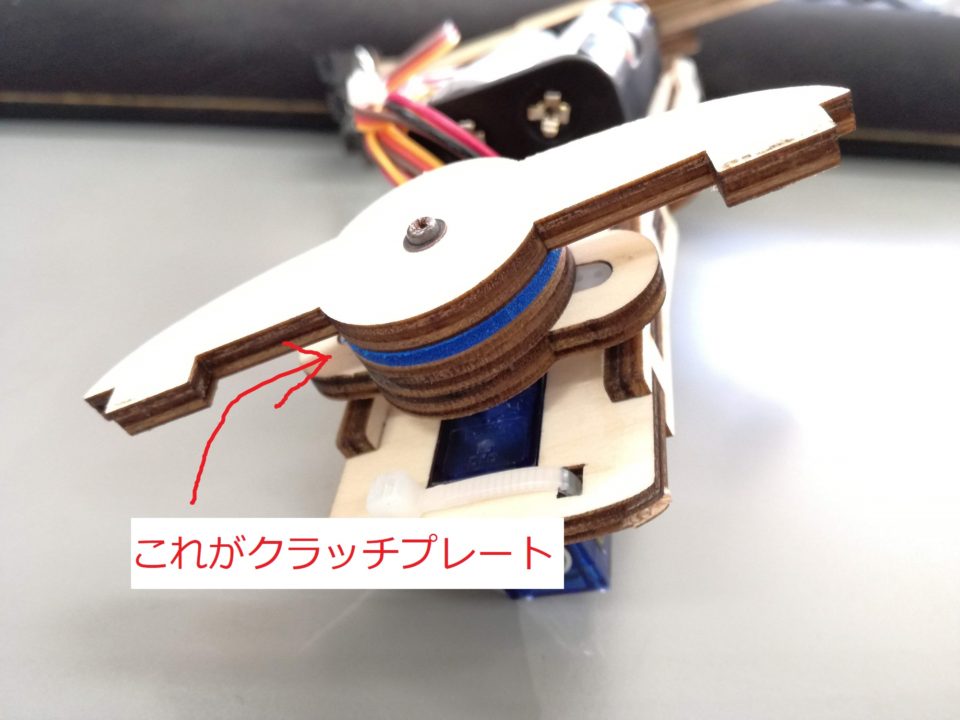
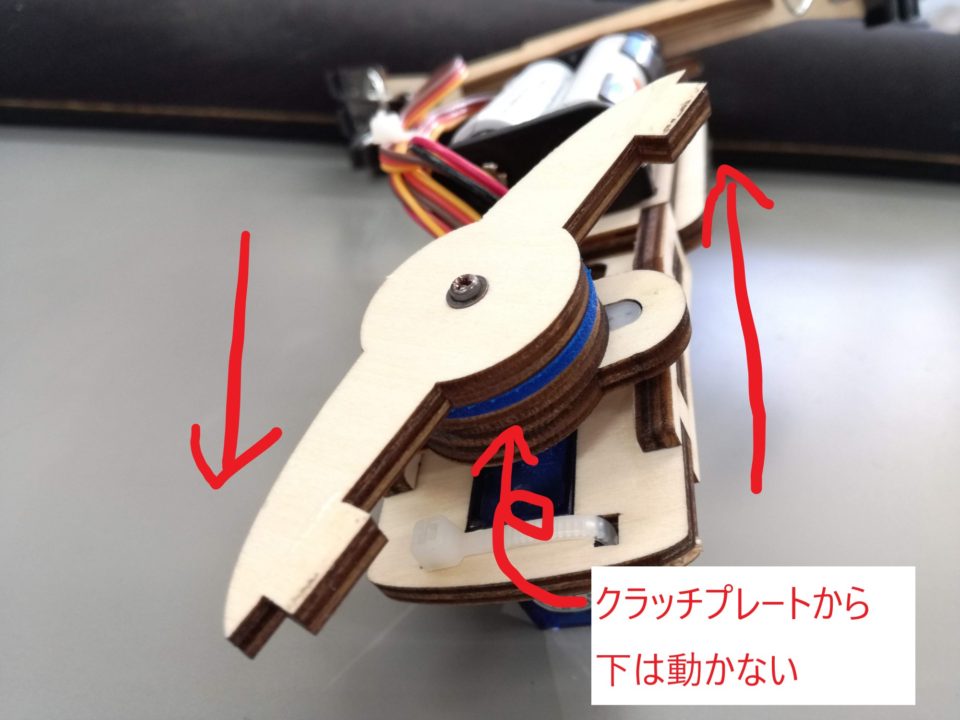
強い力がかかった時だけ、クラッチが滑ることでサーボモーターの故障を防ぎます。
この滑る力をどれくらいに設定するかが、中央のねじの締め付け具合で調整出来るようになっています。
強すぎると衝撃が伝わって壊れ、弱すぎると足を動かすことが出来ません。
ねじどめの加減を体験することが出来るので、ワークショップをする際にはぜひこのポイントをお子さん達に伝えてみてください。
ファブウォーカーは2018年12月19日より代理店向け出荷開始、エレキットストアでは12月25日より出荷開始です。
エレキットストアでは予約を受け付けていますので、ぜひ年末年始のちょっとした遊びと学びに使ってみてください。
ご注文はこちらから
ファブウォーカー(FW-05) – エレキットストア